基于soc的嵌入式系统解析方案
来源:元器件交易网 作者:—— 时间:2012-04-23 11:27
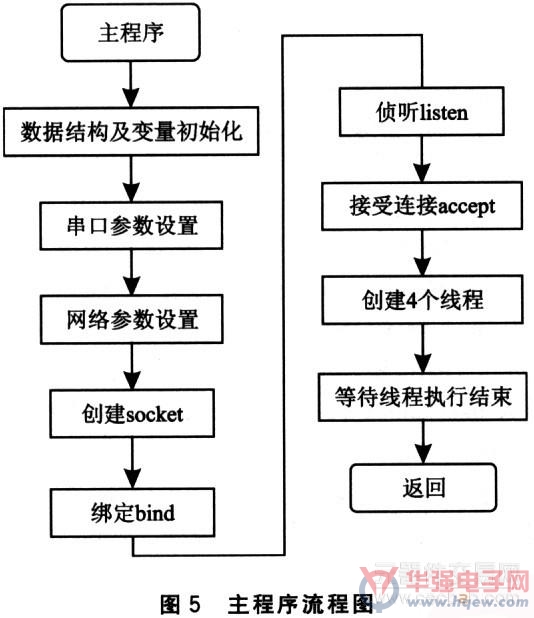
在此应用系统中有4个任务,分别创建4个线程:网络接收线程、网络发送线程、串口 接收线程和串口发送线程。这4个线程可并发执行.因网络速度与串口速度存在着差异,需设置相应的缓冲区来对收发数据进行缓冲。在此应用系统中设置两个环形 缓冲区,如图4所示,其中nctrv_uartsd_buf用于接收网络数据,供存储从网络口接收的数据,然后串口从此缓冲区中取出数据发送。另一缓冲区 uartrv_netsd_bur用于接收串口数据,然后网络口取出此缓冲区中数据发送出去。
线程间需实现相互通信和同步,共用缓冲区既要互斥执行又要同步执行,其操作遵循生产者和消费者模型。线程间的互斥操作采用互斥锁(mu-
tex)来实现。线程间的同步通过设置两个指针来实现,一个是读指针,另一个是写指针,写指针指向队头,初始化为0,读指针指向队尾,初始化为
bufsize-1。当写数据时,比较读写指针是否相等,相同则写线程阻塞;不相等,则写入数据,然后将写指针加1。当读数据时,读指针加1,然后比较读
写指针是否相等,相等则读线程阻塞;不相等,则读出数据。
网络发送线程(流程图如图6所示)和串口接收线程(流程图如图7所示)间共用环形缓冲区uartrv_netsd_buf。串口发送线程和网络接收线程共 用环形缓冲区netrv_uartsd_buf。两线程间的关系和处理类似网络发送线程和串口接收线程。
下一篇:LCOS投影技术方案解析
- •ADI宣布Sensinel by Analog Devices心肺管理(CPM)系统获得美国FDA 510(k)认证并正式上市2024-03-07
- •人工智能安全关键型系统中的验证和确认2024-02-29
- •Omdia:预计 L3 及以上自动驾驶系统平均配备 5-8 个毫米波雷达2023-02-23
- •研究显示近半数美国司机将高级辅助驾驶系统当自动驾驶用2022-10-12
- •立即领票 | 芯片+封测+嵌入式系统大展9.15-17深圳福田见!国产化元器件一站式选型2022-08-23
- •深圳国际电子展暨嵌入式系统展在深圳举行2021-09-27
- •日本光伏发电系统也开始“缺芯”了2021-07-14
- •Cadence推出下一代Palladium Z2和Protium X2系统2021-04-06
- •思特威全新推出SC910GS与SC410GS,全面赋能智能交通系统2021-01-07
- •莱迪思将其FPGA拓展至智能和嵌入式视觉系统2020-09-11