
让LED定向照明:同步多曲面
来源:维库电子 作者:--- 时间:2011-07-05 00:00
led(Light-Emitting-Diode中文意思为发光二极管)是一种能够将电能转化为光能的半导体,它改变了白炽灯钨丝发光与节能灯三基色粉发光的原理,而采用电场发光。据分析,LED的特点非常明显,寿命长、光效高、无辐射与低功耗。LED的光谱几乎全部集中于可见光频段,其发光效率可超过150lm/W.
然而由于LED出射光范围大,单位光学扩展量所具有的光能与传统光源相比较低,直接采用LED照明在大多数情况下难以满足照明灯具和器件所需要达到的性能指标,因此对以LED为光源的照明系统进行二次光学设计是十分必要的。
照明系统一般分为反射型、折射型、全内反射和复合型。LED出射光范围大,反射型或折射型照明系统很难有效地调整LED的全部出射光,而复合型照明系统往往不紧凑。TIR利用折射和全内反射,可以有效地收集和调整LED大范围的出射光,并保证照明系统紧凑。本文首先根据同步多曲面方法及光学扩展量守恒定律设计了一种能有效收集和调整LED出光的定向投射器;然后通过一个具体的实例,对该种投射器的结构及光学特性进行分析和研究。
2 光学扩展量
光学扩展量描述了光学系统传输光能的能力,光束的光学扩展量等于光束在其角度和位置区域内的积。在三维坐标z等于常数的平面内,光束的光学扩展量可表示成:

式中P=nL,q=nM,其中咒为光束所在介质的折射率,L和M为光线的方向余弦。
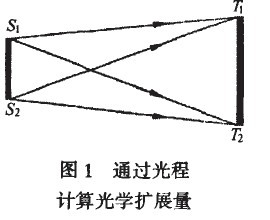
图1中,从光源S1S2出射并入射到目标T1T2上的光学扩展量为:

式中S1T2和S1T1表示光程。对应三维下的光学扩展量为:

光束经理想光学系统作用后,其光学扩展量不变,系统所接收的光束将全部传输至目标面。
3 同步多曲面方法
一般情况下,对于给定的两组光束来说,存在两个曲面,使入射光束经偏折后成对应的出射光束。在二维下,可利用同步多曲面方法求解由这两个曲面对应的轮廓曲线。所谓同步多曲面方法旧J,是指所有待求曲面的求解过程是同步进行的,其中一个待求曲面的求解结束意味着其余待求曲面的求解结束。同步多曲面方法通过逐点求解的方式求解轮廓曲线的点,其中一条轮廓曲线上的一点可以通过另一条轮廓曲线上的已求点求得,如此反复便可同时求得两条轮廓曲线。
现对光源出射光的定向控制为例来阐述同步多曲面方法,如图2所示。
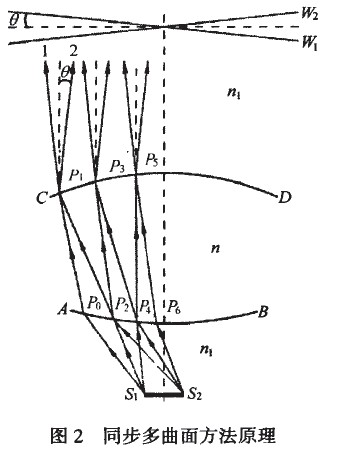
曲线AB和曲线CD分别为曲面AB和曲面CD的轮廓曲线,介质n和介质n1,为两种不同的介质。点S1和点S2为光源S1 S2的两个边缘点,由点S1和点S2出射的光束经曲线AB和曲线CD折射后分别对应波前w1和波前w2。已知其中一条曲线上的一点和曲线在该点的法线(如点Po和曲线AB在点Po处的法线),以及点Sl(点S2)到波前Wl(波前W2)的光程Z。
边缘光线S1Po经曲线AB折射后,折射光线为PoPl,根据已知条件可求得点P及曲线CD在点P1的法线。边缘光线S2P2经曲线AB折射后,折射光线为P2P1,根据已求点P1、曲线CD在点P1的法线以及光程可求得点P2及曲线AB在点P2的法线。
如此反复,便可同时求得曲线AB和曲线CD的点,然后拟合已求点可得曲线AB和曲线CD。
在利用同步多曲面方法求解轮廓曲线时,应考虑光源的所有边缘光线,并要求轮廓曲线上除端点之外的每个点仅有两条边缘光线通过。图2中,光线1和光线2分别对应边缘光线S2P2和边缘光线S1 Po。根据边缘光线原理,位于边缘光线S1 Po和边缘光线S2P2之间的所有光源的出射光,经曲线AB和曲线CD折射后将分布于光线1和光线2之间。
因此,利用同步多曲面方法设计的光学系统能有效收集和调整扩展光源的出射光。
4 照明系统设计
本文旨在设计一种定向投射器,该种投射器能有效收集大功率LED的出射光,并使收集的LED出射光经投射器作用后分布在光轴两侧预定的光分布范围内。
图3为投射器示意图。为方便设计加工,曲面EC取为圆锥面,轮廓曲线EC斜率的选取应保证经曲面FM和曲面NQ全反射后的光线在曲面EC上不产生全反射。使曲面AB和曲面CD实现对光源小角度内出光的收集和调整,使曲面AT、曲面FM、曲面TV及曲面NQ实现对光源大角度内出光的收集和调整。已知光源出光的光学扩展量为E,根据光学扩展量守恒定律及式(1)可得:

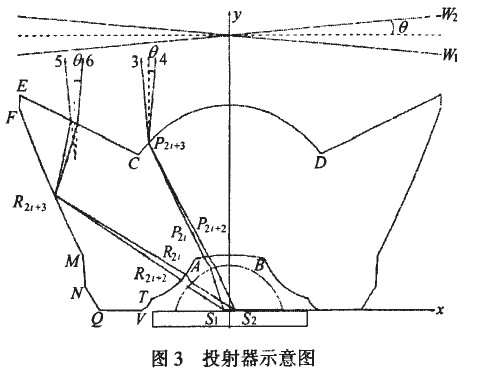
式中:汐为预定的光分布角度,即所要求的经投射器作用后的出射光与光轴的最大夹角,如图3所示;S为投射器出光口处波前分别为w1和W2的所有光线组(如图中的光线3和光线4、光线5和光线6等)的交点在垂直于光轴的平面内形成的投影面积。
由上式可求得该投影面积为:

由式5和图3可知,角度日决定投影面积S,进而决定投射器的出光口半径。
该投射器的设计方法:首先根据大功率LED的出光分布及预定的光分布角度口,结合光学扩展量守恒定律及边缘光线原理,利用同步多曲面方法求解AB、CD、AT、FM、TV及NQ上的点;然后拟合已求点得到相应的曲线。
4.1 折射面到折射面的设计
入射到曲面AB上的从光源小角度内的出光,经曲面AB和曲面CD折射后成满足预定角度范围的光分布,曲面AB和曲面CD的设计过程如图4所示。初始条件是起始点P0、点P1的纵图4折射面到折射面的设计坐标、波前w1和波前w2。
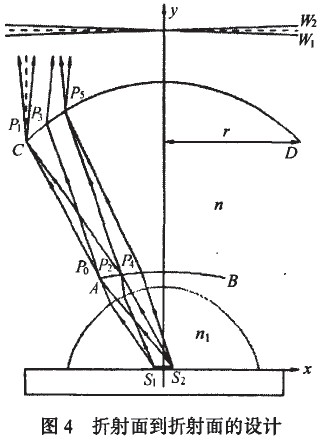
考虑到投射器的紧凑,在选取点Po时应参考光源的外形尺寸。根据点P0,由式(2)可求得二维下由芯片出射入射到曲线AB的光束的光学扩展量:

根据光学扩展量守恒定律以及预定的光分布角度臼,可求得由曲线CD对应的出光口半径:

为实现对所有入射到曲线AB上的光束的有效收集和调整,要求边缘光线S2Po经曲线AB折射后入射到曲线CD上的点P1再经曲线CD折射成波前为wl的出射光;边缘光线S1Po经曲线AB折射后人射到曲线CD上的点P3再经曲线CD折射成波前为w1的出射光;边缘光线S2P2经曲线AB折射后入射到曲线CD上的点P1再经曲线CD折射成波前为%的出射光。
由上述要求可知,曲线段P1P3及曲线段PoP2均为笛卡尔卵圆。根据费马原理和折射定律可求得曲线段P1P3和曲线段PoP2上的点,以及曲线在各已求点处的法线。利用点P3可求得边缘点S1到波前w1的光程Z。之后,利用同步多曲面方法求解曲线CD和曲线AB除笛卡儿卵圆之外的部分。在求得曲线AB及曲线CD位于光轴左侧的点后,由对称性可得已求点关于光轴的对称点。分别拟合曲线AB及曲线CD上的已求点,可得曲线AB及曲线CD。
4.2 折射面一全反射面设计
在该投射器内有两组曲面对在光源大角度内的出射光进行收集和调整,第一组为曲面AT和曲面FM,第二组为曲面TV和曲面NQ。
先求解第一组曲面。初始条件是点R。和点R1。点R1的确定如图5所示。光线SlRo经折射后入射到点R 1,然后经全反射和线段EC折射成光线8。与光线8对应的是光线7,光线7和光线8的延长线相交于点G。光线S1 F1首先经全反射后入射到线段EC的端点C,然后经线段EC折射成光线10。
与光线10对应的是光线9,光线9和光线10的延长线相交于点G2。
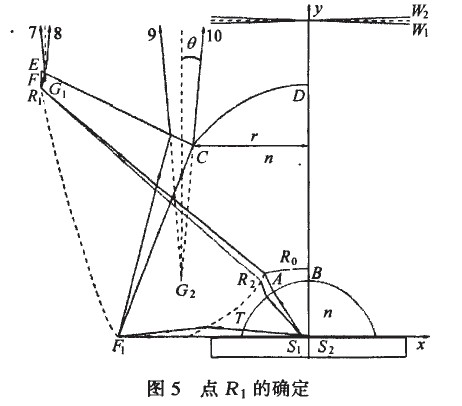
根据光学扩展量守恒定律,可求得从曲面EC出射的所有光线组的交点在垂直于光轴的平面内形成的投影面积:

为使所有经曲面FM和曲面NQ全反射后的光线均能从曲面EC出射,要求:

式中z1和z2分别为点G1和点G2的横坐标。在选取点R1时,除了其横坐标满足上式外,该点应位于直线EC的下方,且使曲线AT在点Ro处的法线与。27轴正向的夹角较大(一般在3rad左右)。该夹角越大,曲线A丁下降的趋势越大,曲线AT在z轴上的投影长度越短,投射器越紧凑。在确定点R1并求得曲线AT在点Ro处的法线后,可进行曲面AT和曲面FM的求解,求解过程如图6所示。
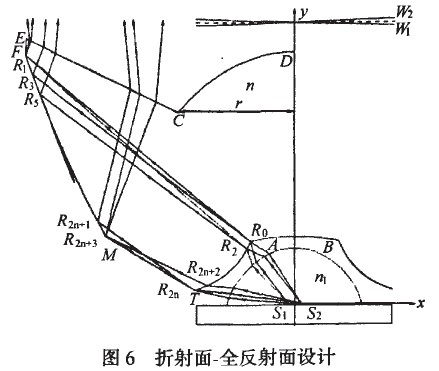
为实现对所有入射到曲线AT的光束的有效收集和调整,在曲线AT和曲线FM的起始端应分别有笛卡尔卵圆曲线段R1R3和曲线段RoR2。曲线段尺1R3和曲线段RoR2的求解过程分别与图3中的曲线段P1P3和曲线段PoP2的求解过程相同。
之后可利用同步多曲面方法和线性扩展法求解曲线FM和曲线AT除笛卡儿卵圆之外的部分。所谓线性扩展法,是指在求解曲线上某一点时,把该点的入射光线与曲线在上一点处的切线的交点定义为该点。如在确定点R5时,把直线R2R5与曲线FM在点R3处的切线的交点视为点R5。
考虑到投射器的紧凑,在求解曲线AT时,要求曲线AT在所有已求点处的法线与z轴正向的夹角口较大(一般α≥1.9rad)。在曲线AT上当已求点R2n处的α≥1.9tad,而在下一点处的α<1.9rad时,此时应结束利用同步多曲面方法求解曲线AT,并在曲线AT和曲线FM的结束端各添加一段笛卡尔卵圆曲线段R2n+1尺2n+3和曲线段R2nR2n十2。分别拟合曲线AT和曲线FM上的已求点,可得曲线AT和曲线FM。
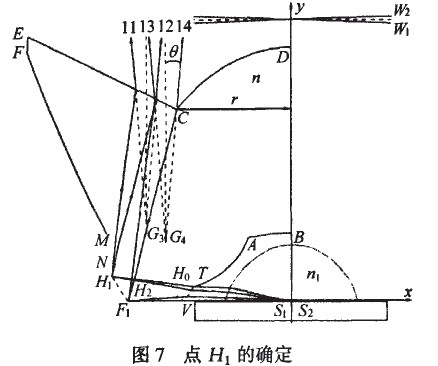
接下来求解第二组曲面。初始条件是点Ho和点H1。点H1的确定如图7所示,点G3和点G4分别为光线11和光线12延长线的交点,以及光线13和光线14延长线的交点。
为使所有经曲面NQ全反射后的光线从曲面EC出射,要求了

式中:z3和z4分别为点G3和点G4的横坐标;S09为从曲面CD出射,由波前分别为w1和w2的所有光线组的交点在垂直于光轴的平面内形成的投影面积;SrTw为经曲面FM全反射后,由经曲面EC折射成的波前为w1和Ⅳ:的所有光线组的交点在垂直于光轴平面内形成的投影面积。在选取点H,时,要求点H1的横坐标满足上式且大于点M的横坐标(便于加工时开模);点H,应位于曲线FM的下方;曲线TV在点Ho处的法线与z轴正向的夹角较大(一般在3rad左右)。在确定点Hl并求得曲线T、,在点H0处的法线之后,可进行曲面TV和曲面NQ的求解。
曲线Ⅳ和曲线NQ的求解过程分别与曲面AT和曲面FM的求解过程相同。在求解曲线TV时,由于曲线Ⅳ在点H0处的法线与z轴正向的夹角较大,而点H0的纵坐标往往很小,因此在曲线TV的法线与X轴正向的夹角小于1.9rad之前,曲线TV和曲线NQ的求解便可完成。之后,分别拟合曲线NQ和曲线T、,上的已求点,得到曲线NQ和曲线Ⅳ。
为方便加工,用线段连接点E和点F,点E的横坐标应大于点F的横坐标;用线段连接点M和点N。然后旋转投射器的轮廓曲线,得到投射器三维模型,至此投射器设计完成。
5 设计实例与模拟分析
采用1×1㎡112的LED芯片作为光源,投射器所用材料选用有机玻璃(PMMA)。要求LED芯片的所有出射光经投射器作用后分布在光轴两侧2。
的范围内。与芯片相对的内折射曲面轮廓曲线的端点取为(一4,6)。
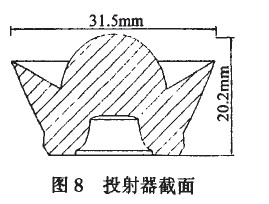
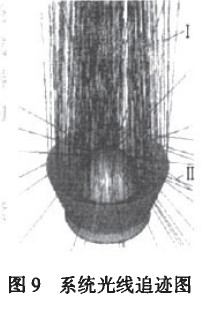
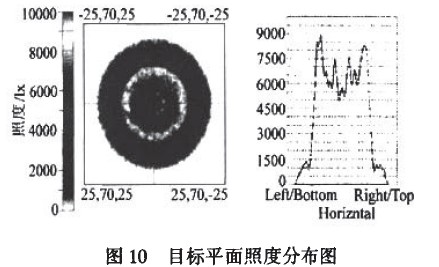
根据上述分析,将计算所得的各轮廓曲线上的点导人UG进行曲线拟合,然后将拟合生成的轮廓曲线绕光轴旋转得到投射器的三维模图8投射器截面型。图8是该投射器的截面外形尺寸,透射器出光口直径为31.5mm,高度为20.2mm。再将投射器的三维模型导入Tracepro,并对LED出射光进行光线追迹。图9为系统的光线追迹图,I类为LED出射光经投射器作用后分布在预定的光分布范围内的光束,Ⅱ类为LED出射光经各折射面菲涅尔反射形成的光束。图10为距投射器顶部50mm处目标平面的照度分布图。
模拟分析结果表明:
(1)系统结构十分紧凑。
(2)系统的效率大于图9系统光线追迹图91%,光能损失主要是由各折射面的菲涅尔反射以及投射器所用材料对光能的吸收引起的。
(3)投射器有效地实现了对LED全部出射光的收集和定向控制。
6 结论
本文提出了一种实现对大功率LED出射光有效收集和定向控制的投射器设计方法。根据LED的出射光分布、预定的光分布范围及光学扩展量守恒定律,利用同步多曲面方法求得各折射面和全反射面轮廓曲线上的点。在UG中首先对已求点进行曲线拟合,并通过旋转拟合曲线得到投射器模型以及适合数控加工的面形数据,然后再将该模型导入Tracepro光学设计专用软件。对u、D出射光进行光线追迹,并对系统的效率进行了分析研究。用该种方法设计的定向投射器结构紧凑、光能传输效率高,能有效收集和定向控制UD的全部出射光。
上一篇:凄清之美LED落叶灯




