
基于COMX和STM32的机器人伺服控制器电路设计
设计了基于COMX和STM32的机器人伺服控制器解决方案。首先介绍了COMX模块的功能及结构,然后设计了基于FSMC的接口电路来控制COMX。系统采用实时工业以太网EtherCAT协议作为机器人伺服系统的底层协议,同时构建伺服从站控制器。实时以太网技术简化了一般总线的互操作性和实时性等方面的问题,能满足控制网络传输的实时性要求,EtherCAT工业以太网技术以其网络实时性高、速度快、拓扑结构灵活等优点得到广泛关注。本控制器采用德国赫优讯公司开发的嵌入式实时以太网模块COMX来完成EtherCAT通信的功能,采用STM32为主控制器,由STM32来控制电机和COMX的工作流程。
硬件电路模块
本伺服控制器主要用于机器人伺服节点通讯、关节电机的控制、I/O控制以及传感信息的采集。主要硬件由COMX和STM32来组成,其中COMX负责EtherCAT通信,STM32采用FSMC机制来读写COMX;STM32是从站的伺服控制器主控芯片,主要进行电机控制和A/D、D/A模块的控制,以及负责管理COMX模块的运行流程。其中伺服通信功能是基于EtherCAT协议进行组网来达到各模块互联和数据交换的目的,这样便于伺服节点的扩展和硬件结构的设计;在电机控制上采用RS485接口控制SR518数字舵机;其中I/O口用于基本的输入输出功能;A/D通道可以连接传感设备用于机器人的感知,D/A通道用于对语音、电流等模拟量的输出;RS232是开发过程中的调试接口。
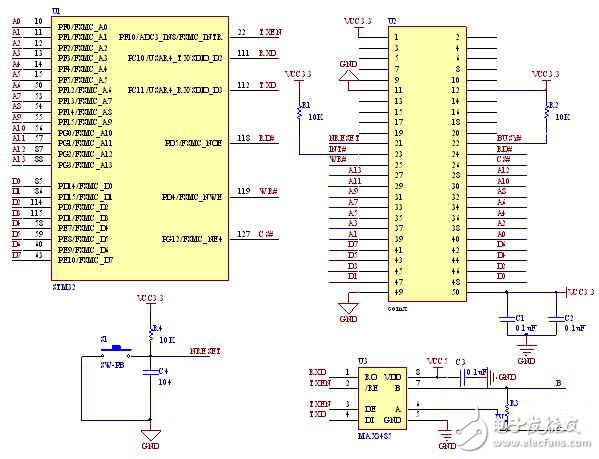
图3.硬件电路图
STM32采用FSMC机制控制COMX,将COMX映射到STM32的内存空间中,对COMX的读写方式和读写SRAM相同。 FSMC是集成在STM32F系列芯片上的外部存储器控制接口,FSMC能控制两种存储器: NOR Flash/SRAM控制器、 NAND Flash/PC卡控制器。嵌入式模块COMX通过一个50PIN插槽来连接主控芯片,插槽包含了与主机通信必备的控制线总线、16位数据总线和14位地址总线等;COMX与STM32的硬件电路图如图3所示,由电路图可知COMX内存映射到FSMC的第一个存储块的第四个分区中,起始地址为 0x6C000000,并且采用8位数据宽度来读写DPM存储区。
- •Arm 洞察与思考:AI 技术破解创新与环境可持续发展难题2025-07-02
- •国内芯片厂商翻身机会!RISC-V与arm决战在全球半导体变局中2022-07-14
- •意法半导体STM32Cube.AI生态系统加强对高效机器学习的支持2021-08-24
- •意法半导体推出支持STM32的计算机视觉快速开发工具2021-03-04
- •意法半导体推出首款STM32无线微控制器模块 提升物联网产品开发效率2021-01-13
- •取代Intel!苹果Mac设备全线迁移ARM可行性有多大?2020-03-28
- •x86+ARM混合架构?Xbox Series X将首发迄今最复杂SoC2020-03-16
- •意法半导体推出STM32系统芯片,加快LoRa IoT智能设备开发2020-01-09
- •Arm透过全新Mbed操作系统伙伴管理模型 与半导体伙伴展开物联网合作2019-10-10
- •Arm:在共同架构下推动全面运算,将机器学习的性能推升至全新水平2019-10-10




