
PID算法的FPGA实现
来源:华强电子网 作者:------ 时间:2014-07-08 13:52
3.PID算法的FPGA实现
由公式(5)知,增量式PID控制算法的具体实现步骤为:先通过误差计算模块求出偏差值e(k)、e(k-1)、e(k-2),再通过乘积模块求出三个信号分别与乘积因子的相乘,最后对乘积项求和得到最后的控制量。图2所示为增量式PID算法结构图。
3.1 误差计算模块
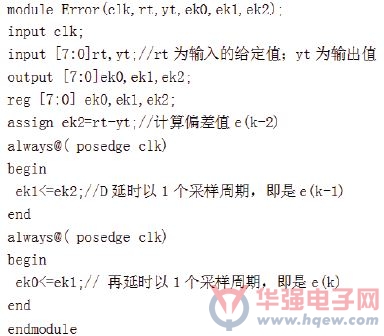
误差计算模块的目的是为了求出三次相邻的偏差采样值,即公式(3.8)中提到的e(k)、e(k-1)、e(k-2),输入的给定值r(t)与实际输出值y(t)相减得到误差值。Verilog HDL程序代码如下,其中,ek0、ek1、ek2、rt、yt分别对应偏差值e(k)、e(k-1)、e(k-2)、r(t)、y(t)。
将上述程序在Quartus II软件环境里完成编译后,其仿真结果如图3所示。
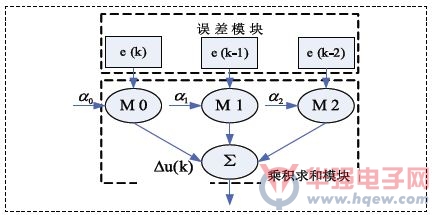
图2 增量式PID算法结构图
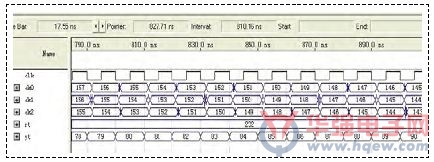
图3 误差模块仿真图
相关文章
- •【会议议程】12月19-21日2022(十四届)传感器与MEMS产业化技术国际研讨会(暨成果展)佛山南海瞻云酒店召开2022-12-16
- •FORESEE XP1000 PCIe SSD开启Gen3后时代发展之路2021-08-02
- •FORESEE工规级SSD应用宽温技术,加速智能工业场景落地2021-07-21
- •基于J750EX测试系统的SRAM VDSR32M32测试技术研究2017-09-05
- •Vishay检查表: 采用安规电容防止过载的12点注意事项2017-07-28
- •汽车系统的USB供电2017-06-08
- •适用于 FPGA、GPU 和 ASIC 系统的电源管理2017-05-11
- •一文读懂SPI串行外设接口2017-04-27
- •TLV3501滞回比较器电路设计2017-04-14
- •ZigBee无线呼叫系统硬件电路2017-04-05




