PID算法的FPGA实现
来源:华强电子网 作者:------ 时间:2014-07-08 13:52
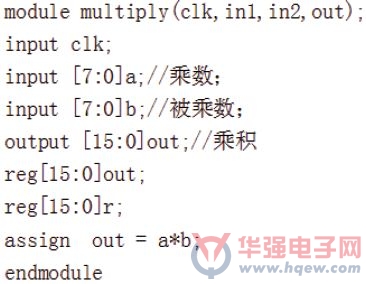
3.2 乘积和求和模块
通过误差计算模块求出e(k)、e(k-1)、e(k-2)后,由公式(5)知,要计算出控制量还必须将其分别与乘积因子做乘法运算,通过硬件描述语言来实现乘法运算的功能:
按照上述程序,在Quartus II完成编译后,其仿真结果如图4所示。
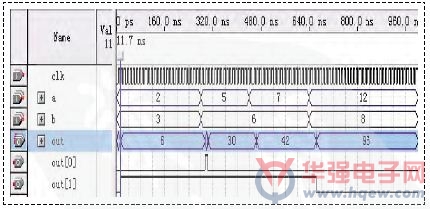
图4 乘法器仿真图
现在可计算出α0e(k)、α1e(k-1)、α2e(k-2)三个乘积项的计算结果,将上面三个乘积项求和就可以得出控制量△u(k)。程序代码如下所示,其中输入val0[15..0]、val1[15..0]、val2[15..0] 分别对应α0e(k)、α1e(k-1) 、α2e(k-2)乘积的结果,输出val[15..0]就是控制量△u(k)的值。
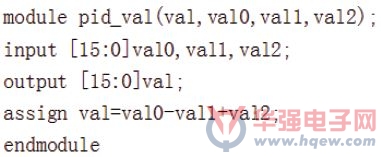
按照上述程序,在Quartus II完成编译后,其仿真结果如图5所示。
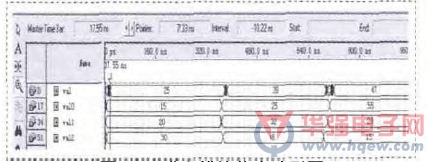
图5 PID求和模块仿真波形图
3.3 温度检测及输出控制电路设计
本文用到的温度测量器件是K型热电偶,温度测量范围为0~1200℃。热电偶输出的是模拟电压信号,必须进行A/D转换,同时还需对热电偶进行冷端补偿和非线形校正。为了解决上面的问题,本文采用的是K型热电偶专用数字转换器MAX6675芯片,MAX6675芯片内部集成了热电偶放大器,内置高达12位的模数转换器。还包括了非线性矫正、冷端补偿、断线检测等功能模块。MAX6675的工作温度范围为-20~85℃,温度的测量范围为0~1024℃,温度分辨率可以达到0.25℃。假设D为A/D转换后得到的数字量对应的十进制数值,那么测量温度值T可以通过如下公式算出:

输出控制电路采用的是PWM(脉宽调制)方式,实现对电阻炉的温度控制。光耦芯片选用MOC3061,用于对强弱电路的隔离,双向导通可控硅选用的是BT137_600E。如果占空比越高,那么相对可控硅导通的时间也就越长,电阻炉加热温度也就越高,反之温度也就会慢慢散热降低,从而达到控制炉温的目的。
4.结语
本文分析了PID算法,给出了在FPGA内部硬件实现增量式PID控制的主要设计思路。在电阻炉为控制对象的温控系统中,系统工作稳定,在整个过程没有出现震荡和较大波动,并且温度控制精度在始终保持在5%以内;系统的抗干扰能力增强,对现场的各种噪声和干扰具有较好的抑制作用。
关注电子行业精彩资讯,关注华强资讯官方微信,精华内容抢鲜读,还有机会获赠全年杂志。
关注方法:添加好友→搜索“华强微电子”→关注
或微信“扫一扫”二维码

- •【会议议程】12月19-21日2022(十四届)传感器与MEMS产业化技术国际研讨会(暨成果展)佛山南海瞻云酒店召开2022-12-16
- •FORESEE XP1000 PCIe SSD开启Gen3后时代发展之路2021-08-02
- •FORESEE工规级SSD应用宽温技术,加速智能工业场景落地2021-07-21
- •基于J750EX测试系统的SRAM VDSR32M32测试技术研究2017-09-05
- •Vishay检查表: 采用安规电容防止过载的12点注意事项2017-07-28
- •汽车系统的USB供电2017-06-08
- •适用于 FPGA、GPU 和 ASIC 系统的电源管理2017-05-11
- •一文读懂SPI串行外设接口2017-04-27
- •TLV3501滞回比较器电路设计2017-04-14
- •ZigBee无线呼叫系统硬件电路2017-04-05